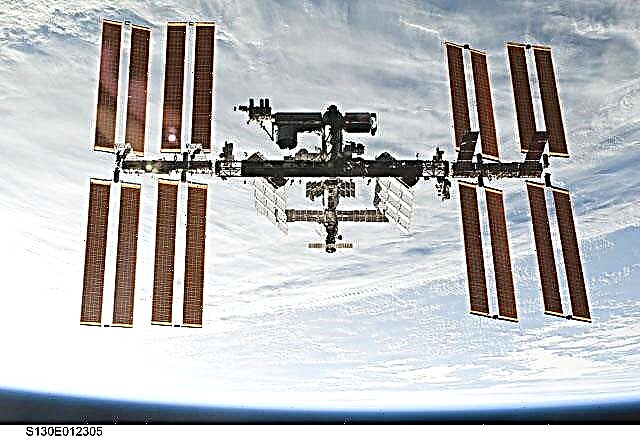
L'ESA a consacré ces dernières années à la création d'une base lunaire internationale, qui servira de successeur spirituel à la Station spatiale internationale (ISS). Pour ce faire, ils ont fait appel à d'autres agences spatiales et entrepreneurs pour développer des concepts d'habitats spatiaux et des méthodes de construction ainsi que des moyens de fournir un soutien robotique et logistique.
Récemment, l’élément de développement technologique (TDE) de l’ESA a signé avec le développeur technologique français COMEX pour créer le système robotique TRAILER. Ce projet de deux ans testera une nouvelle architecture de mission où deux rovers travaillent en tandem (et avec l'aide d'astronautes) pour explorer la surface lunaire et construire un avant-poste permanent sur la Lune.
Le système TRAILER s'appuiera sur un certain nombre de progrès récents dans les domaines de la robotique, de la télécommande et des logiciels d'autonomie. Les robots tandem sont conçus pour fonctionner à partir de la Terre ou d'une base en orbite lunaire - c'est-à-dire la passerelle lunaire. Cependant, ils devront également fonctionner de manière autonome pendant des périodes de temps et effectuer des tâches sans que les astronautes les supervisent.

En fin de compte, TRAILER est conçu pour tester des systèmes d'exploration robotique qui se composent de deux éléments, appelés TRACTOR et WAIN. Le premier nécessite un élément mobile rover qui sera capable de s'aventurer sur la surface pendant de courtes périodes, d'obtenir des échantillons pour analyse et de communiquer via un émetteur-récepteur sans fil local.
Pendant ce temps, l'élément WAIN consistera en une remorque active qui fournira une base d'opérations pour le rover et sera limitée en termes de mobilité et de navigation. Cela comprendra un réseau sans fil local pour faciliter les communications de la surface lunaire à la Terre (ou en orbite), alimenter le rover et lui-même, et aider aux opérations scientifiques avec un laboratoire embarqué.
Bien que ces robots puissent être contrôlés depuis la Terre, l'architecture de la mission a été conçue en pensant à la passerelle lunaire. Cet habitat - qui est développé par la NASA, l'ESA et un consortium de partenaires internationaux - sera le premier avant-poste humain au-delà de l'orbite terrestre et servira de camp de base pour des opérations sur la surface lunaire.
Celles-ci incluent le retour de la NASA sur la Lune (Projet Artemis) et l'atterrisseur et le rover proposés par l'ESA, l'architecture robotique améliorée par l'homme et la capacité d'exploration et de science lunaire (HERACLES). Et bien sûr, il existe des plans à long terme de l’ESA, en collaboration avec d’autres agences spatiales et des partenaires internationaux, pour créer le Village lunaire international tant attendu.
Dans tous les cas, le succès dépendra de la coopération; non seulement entre les agences et entre les entités publiques et privées, mais aussi entre les astronautes et les explorateurs robotiques. Lorsque TRAINER sera terminé, il rejoindra un certain nombre de missions robotiques dans le bassin du pôle Sud-Aitken qui exploreront des ressources pouvant être utilisées pour soutenir les opérations humaines - alias. Utilisation des ressources in situ (ISRU).
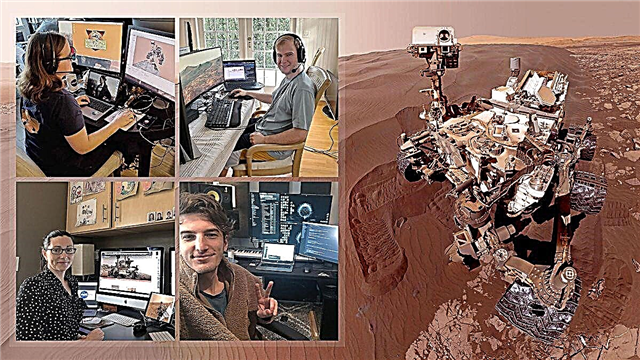
L'ESA est également actuellement engagée dans le développement d'un nouveau type d'infrastructure de commandement et d'un système de contrôle à retour de force qui permettra aux astronautes de «ressentir» ce que ressent un rover. Dans le cadre des expériences Analog-1, l'astronaute de l'ESA Luca Parmitano a démontré avec succès la capacité du système à contrôler un rover sur Terre depuis l'ISS.
Le développement de TRAILER sera dirigé par le COMEX avec le soutien du Centre de recherche allemand pour le centre d'innovation en robotique d'intelligence artificielle (DFKI RIC) et de la société de robotique basée à Vienne LIQUIFER Systems Group.