Alors que le rover Curiosity Mars de 1 tonne de la NASA entreprend son périple épique vers les anciennes couches sédimentaires au pied du mystérieux mont Sharp, Space Magazine a réalisé une interview exclusive avec le directeur du projet Curiosity Jim Erickson, du Jet Propulsion Laboratory (JPL) de la NASA pour obtenir le dernier scoop pour ainsi dire sur les robots aventures d'un autre monde.
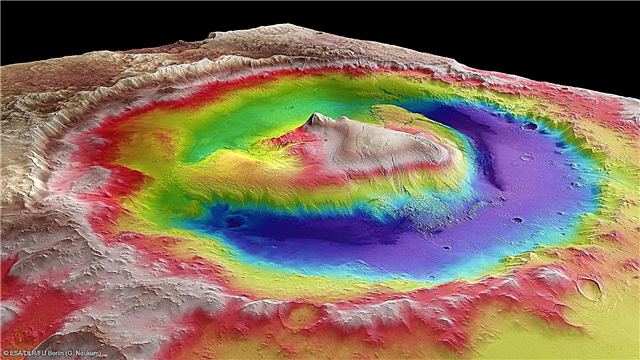
Les équipes scientifiques et d'ingénierie travaillent avec diligence en ce moment pour accélérer le voyage des rovers, qui dure environ un an, vers la montagne martienne de 3,4 miles (5,5 km) de haut - qui est la principale destination de la mission et contient des caches de minéraux qui sont essentiels pour étinceler et soutenir la vie.
"Nous avons quitté Glenelg et l'affleurement de Shaler et avons commencé à Mount Sharp", m'a dit Erickson.
Dans l'ensemble, le rover à six roues vient de dépasser la barre des 1 kilomètre (0,62 mile) en parcourant la planète rouge.
Le mont Sharp se trouve à environ 8 kilomètres à vol d'oiseau.

La curiosité devra traverser des champs de dunes potentiellement dangereux sur la longue route qui mène à la montagne en couches.
«Les choses vont très bien et nous avons quelques entraînements à notre actif», a déclaré Erickson.
Curiosity vient d'achever plus de six mois de science abondante à Glenelg et à Yellowknife Bay, où elle a découvert un environnement habitable sur la planète rouge avec les ingrédients chimiques qui pourraient soutenir les microbes martiens, atteignant ainsi déjà l'objectif principal de la mission phare de la NASA sur Mars.
Les gestionnaires de Curiosity améliorent le cerveau du rover avec un nouveau logiciel de conduite, ce qui la rend plus intelligente, plus productive et capable que jamais, et aussi beaucoup plus indépendante depuis son atterrissage à couper le souffle à l'intérieur de Gale Crater il y a près d'un an le 6 août 2012.
«Nous continuons de conduire régulièrement. Le prochain trajet est prévu demain et sera exécuté le lendemain. »
À ce jour (Sol 336, 17 juillet), Curiosity a conduit six fois depuis son départ de Glenelg le 4 juillet (Sol 324), totalisant plus de 180 mètres.

Les scientifiques ont spécifiquement ciblé la curiosité sur le cratère de Gale et le mont Sharp, car il est chargé de dépôts de minéraux argileux qui se forment dans l'eau neutre et qui pourraient éventuellement soutenir l'origine et l'évolution de formes de vie martiennes simples, passées ou présentes.
Erickson a occupé des postes clés dans de nombreuses missions de science planétaire de la NASA depuis Viking. Il s'agit notamment de la mission Galileo à Jupiter, les deux MER rovers Spirit & Opportunity, ainsi qu'un passage avec le Mars Reconnaissance Orbiter (MRO).
Voici la partie 1 de ma vaste conversation avec Jim Erickson, chef de projet Curiosity au JPL. La deuxième partie suivra.
J'ai demandé à Erickson de décrire le nouveau logiciel de conduite appelé navigation autonome, ou autonav, et comment cela aiderait à accélérer Curiosity sur son chemin. Jusqu'à présent, les ingénieurs sur Terre faisaient la majeure partie de la planification pour elle.
Jim Erickson: Nous avons mis un nouveau logiciel - appelé autonav, ou navigation autonome - sur le véhicule juste après la période de conjonction en mars 2013. Cela augmentera notre capacité à conduire.
La raison pour laquelle nous l'avons mis à bord est que nous savions que ce serait utile lorsque nous avons commencé le long trajet vers le mont Sharp. Et nous avons hâte de vérifier cela. Au cours des prochaines semaines, nous ferons divers tests avec l'autonav.
Ken Kremer: Comment autonav aidera-t-il la curiosité?
Jim Erickson: Le rover aura la capacité de comprendre jusqu'où il conduit, qu'il glisse ou non, et d'améliorer la sécurité.
Et puis la prochaine étape sera en vigueur pour permettre au rover de conduire seul.
Ken: À quelle fréquence Curiosity conduira-t-il?
Jim Erickson: Quelque part comme tous les deux jours environ. Nous planifions un trajet, voyons comment ça se passe et si ça s'est bien passé, puis nous allons plus loin au prochain trajet. Nous l'implémentons tel quel pendant que nous effectuons les retraits d'Autonav.
Nous devrons peut-être arrêter de conduire pendant une partie de la vérification de la navigation automatique pour terminer le test.
Fondamentalement, nous sommes limités principalement par le nombre de jours que nous avons réussi à conduire le jour précédent. Et si nous avons les informations redescendues [sur Terre] afin que nous puissions planifier la conduite du lendemain.
Dans certaines circonstances, l'heure de Mars peut tourner afin que nous ne récupérions pas les données à temps, donc nous ne conduirons pas ce jour-là.
Ken: Pouvez-vous jamais conduire deux jours de suite?
Jim Erickson: Oui, nous pouvons, si le moment est opportun. Si nous obtenons les résultats du trajet du jour (n) à temps avant de planifier le trajet du lendemain (n + 1) - presque comme si vous étiez à l'heure de Mars. Alors ça marcherait bien.
De plus, lorsque nous obtenons la capacité de navigation automatique, nous pouvons planifier deux jours de suite. Un jour de conduite dirigée et le deuxième jour peuvent être «OK, voici votre cible où que vous vous trouviez, essayez d'aller à cet endroit».
Cela augmentera la productivité!
Ken: Quand Autonav sera-t-il opérationnel?
Jim Erickson: Quelque chose comme deux à trois semaines. Nous devons examiner attentivement tous les tests et les valider en premier afin que nous soyons tous à l'aise avec autonav.
Ken: Comment est le terrain martien sur le sol du cratère Gale en ce moment et pour les prochains kilomètres?
Jim Erickson: C'est un mélange de sable et de différentes zones de dalles. Au fur et à mesure que nous y pénétrons, nous devrons être capables de conduire confortablement sur les deux. Il n'y a pas trop de gros rochers qui pourraient poser problème en ce moment. Il y a une zone d'étagère que nous allons parcourir.
En ce moment, la zone dans laquelle nous nous trouvons est en fait une bonne chose pour nous permettre de nous entraîner à identifier les obstacles et à les contourner. Cela nous aidera plus tard lorsque nous verrons des obstacles et que nous voulons conduire plus vite.
Ken: Quel est le plan global maintenant, l'accent mis sur la conduite ou l'arrêt et l'enquête?
Jim Erickson: - Ce n'est pas l'intention de s'arrêter. Ce sera un bon couple de semaines de conduite.
Dans la partie 2 de ma conversation avec Jim Erickson, nous discuterons davantage de la traversée du rover à travers un territoire étranger qui est à la fois une mine d'or scientifique et un piège mortel potentiel, ainsi que des activités de forage et d'échantillonnage, des observations Comet ISON et des objectifs scientifiques à venir.
L'expérience antérieure avec des rovers sur Mars sera extrêmement utile pour étudier comment le rover interagit avec les champs de dunes. Autonav a d'abord été employé sur les rovers MER.
Les conducteurs de rover et l'équipe scientifique ont acquis beaucoup d'expérience et de savoir-faire en conduisant à la fois Spirit & Opportunity à travers de nombreux champs gigantesques de dunes de composition et de complexité très variables.
Restez à l'écoute pour plus de Mars.