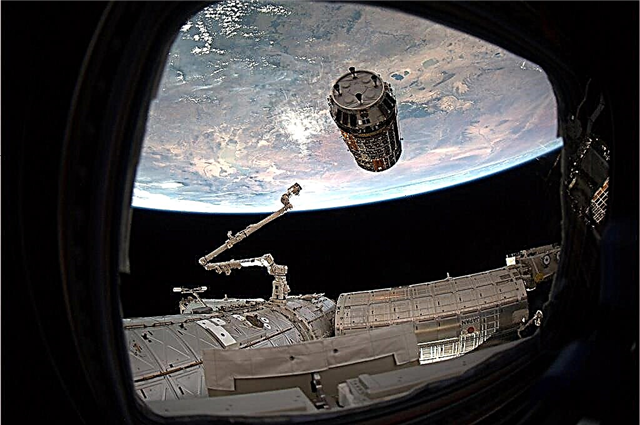
Le nouveau vaisseau spatial critique de ravitaillement du Japon - surnommé Kounotori2, (HTV2) - a été amarré avec succès aujourd'hui (Jan. Kounotori2 - qui se traduit par `` cigogne blanche '' en japonais - a été saisi par l'équipage de l'ISS, puis emboîté manuellement dans un port d'amarrage face à la Terre sur le Module Harmony.
Kounotori2 a été lancé à bord d'une fusée japonaise H-IIB depuis le centre spatial de Tanegashima, dans le sud du Japon, à 00 h 37 (14 h 27, heure du Japon) le 22 janvier pour commencer une poursuite orbitale de cinq jours de la station.
Voir la vidéo et un album photo ci-dessous de la séquence de rendez-vous et d'accueil
Les deux navires sont devenus un alors que l'astronaute Cady Coleman a saisi le `` White Stork '' en vol libre à 6 h 41 HNE avec le bras robotique de la station tandis que les navires volaient en formation à environ 220 milles au-dessus du sud de l'océan Indien dans une direction est.

Après un rendez-vous automatique tôt ce matin, le transporteur de fret sans pilote HTV2 s'est lentement approché de la station spatiale par le bas pour atteindre une série de points d'arrêt de plus en plus rapprochés - 250 m, 30 m et 10 m.
Les contrôleurs de mission sur Terre ont soigneusement manoeuvré le navire de 35 000 livres jusqu'à la distance de capture finale d'environ 33 pieds (10 mètres). Les propulseurs HTV ont été désactivés et il a été placé en mode «dérive libre».
Les astronautes de l'ISS Paolo Nespoli, Cady Coleman et le commandant Mark Kelly ont surveillé l'approche depuis l'intérieur de l'ISS. L'équipage travaillait adroitement aux commandes du poste de travail robotique du dôme d'observation de la coupole.

Enfin, Coleman a doucement attrapé la «cigogne blanche» avec le bras robotique de la station spatiale de 58 pieds de long, construit et apporté par le Canada.
"Grappin terminé, Kounotori est aux prises!" tweeté et twitpiced Paolo Nespoli de l'ISS.
«Cela démontre ce que nous pouvons faire lorsque les humains et les robots travaillent ensemble», a déclaré Cady Coleman par radio. «Nous sommes impatients de transporter HTV 2 - Kounotori - à bord de la Station spatiale internationale.»
Légende de la vidéo: Une cargaison japonaise arrive à l'ISS.
De: NASAtelevision | 27 janvier 2011
Un navire de ravitaillement japonais sans pilote, le «Kounotori» 2 H-2B Transfer Vehicle (HTV2), a été capturé et amarré au port face à la Terre du module Harmony de la Station spatiale internationale le 27 janvier 2011. L'accostage a eu lieu après un vol automatisé de cinq jours après son lancement sur la fusée H-2B de la Japan Aerospace Exploration Agency, le 22 janvier, depuis le centre spatial de Tanegashima, dans le sud du Japon. Le «Kounotori», qui signifie «cigogne blanche» en japonais, est chargé de plus de quatre tonnes de fournitures et de pièces de rechange pour les six membres d'équipage du laboratoire orbital. Les mécaniciens de bord de l'expédition 26 Cady Coleman et Paolo Nespoli étaient aux commandes du poste de travail robotique du module Cupola de la station spatiale pour manœuvrer le bras robotique Canadarm2 pour le grappin et l'accostage du HTV2, qui restera à l'avant-poste orbital jusqu'à la fin de Mars
L'astronaute italien Paolo Nespoli a eu l'honneur de conduire Kounotori2 à un quai dur de la station. La fixation a été terminée à 9 h 51, heure de l'Est, après que Kelly a inspecté le mécanisme d'amarrage et confirmé qu'il était exempt de débris et prêt. 16 boulons ont fermement verrouillé le cargo en place quelques heures plus tard.
L'équipage ouvrira l'écoutille à Kounotori2 le vendredi 28 janvier vers 7 h 30, ce n'est que le deuxième vol du Kounotori. Le véhicule en forme de tonneau est recouvert de 57 panneaux solaires.

Kounotori2 est chargé de plus de 4 tonnes de marchandises sous pression et non pressurisées, y compris des expériences scientifiques, du matériel de recherche, des pièces spatiales, des vêtements, de la nourriture et de l'eau et d'autres provisions en provenance du Japon, de la NASA et du Canada.
Le HTV2 restera ancré à l'ISS pendant environ deux mois jusqu'à fin mars. Pendant ce temps, l'équipage de l'ISS récupérera tout l'équipement et les fournitures pour le transfert vers des emplacements à l'intérieur et à l'extérieur de l'ISS.
À l'aide du bras robotique canadien et du robot Dextre, une palette chargée de grandes pièces de rechange pour la station sera extraite d'une fente sur le côté du robot cargo et attachée à une plate-forme d'expérimentation à l'extérieur du module japonais Kibo.

Le 18 février, l'équipage de l'ISS déplacera le HTV du port face à la Terre. Ils le déplaceront de 180 degrés de l'autre côté du module Harmony vers l'espace face au port zénithal. Cette manœuvre est nécessaire pour fournir suffisamment d'espace pour la découverte de la navette spatiale afin que l'orbiteur puisse également s'amarrer en toute sécurité au module Harmony fin février. La découverte devrait être lancée le 24 février.
L'arrimage HTV2 marque le début d'une période extrêmement chargée de va-et-vient orbitaux à l'ISS.
Un navire de ravitaillement Russian Progress sera lancé plus tard dans la journée, à 20 h 31. EST. Après une poursuite de deux jours, le Progress s'amarrera samedi soir (29 janvier) à 21 h 39. et livrer plus de 6000 livres de fret à la gare. Regarder la télévision de la NASA
Le cargo européen ATV - nommé «Johannes Kepler - décolle le 15 février.
HTV2 Rendezvous & Docking Photo Album: 27 janv. 2011
Toutes les photos Crédit NASA et NASA TV